1. Введение.
При проектировании и, особенно, на стадии внедрения автоматизированных систем управления дорожным движением (АСУДД) участвуют специалисты разных отраслей науки и техники. Они утверждают, что их требования должны учитываться в первую очередь (например, природоохранные требования в центральной части города). Отдельные факторы часто противоречат друг другу - например, средняя скорость передвижения и показатели аварийности. Очень часто при расчете оптимальных планов работы светофоров учитываются только потери транспортного времени и длина автомобильных очередей на перекрестках [1]. В программах, применяемых в западноевропейских странах, учитываются транспортные задержки, число торможений, расход и цена топлива [2]. При этом всегда указываются, что после внедрения АСУДД, снизились загрязнение окружающей среды, аварийность [3,4]. Однако пока на стадии проектирования не проводились исследования, как эти факторы влияют на длительность фаз.
2. Объект исследований.
Стремясь сбалансировать влияние отдельных факторов при расчете оптимальных планов работы светофоров, автор предлагает новую структуру многоцелевой оптимизационной функции, в которой все влияющие факторы умножаются на коэффициенты, выражающие значимость в денежном выражении. Так как в разных странах потери от задержек на перекрестках, от ДТП, цена топлива учитываются по разным методикам [1,2], предлагается оптимизационная функция, которая основывается на экспериментальных данных и экономических показателях городов Литовской Республики
3. Структура многоцелевой оптимизационной функции.
Многоцелевая оптимизационная функция для всех перекрестков АСУДД охватывает транспортные потоки на отдельной полосе, на всех полосах одного перекрестка и потоки всех перекрестков. Этой функцией должны минимизироваться все потери городскому хозяйству на перекрестках, которые значимы статистически [3,5]. К таким факторам относятся:
транспортные задержки на перекрестках на красном сигнале светофора;
потери транспортного времени из-за торможений на перекрестках и перегонах;
потери времени водителей автомобилей;
потери времени пассажиров на индивидуальном и общественном транспорте ;
потери времени пешеходов, пересекающих улицу на перекрестках;
ущерб из-за увеличения расхода топлива при торможении / разгоне;
ущерб из-за увеличения расхода топлива на холостом ходу на перекрестках;
ущерб из-за загрязнения окружающей среды (ОС) транспортным шумом в зонах перекрестков;
ущерб из-за загрязнения окружающей среды (ОС) выхлопными газами ( отдельно по каждому типу загрязняющих веществ) в зонах перекрестков и и на перегонах;
ущерб от ДТП ( наезд на пешеходов или столкновение автомобилей в зоне перекрестка).
На величину ущерба влияют все четыре компонента транспортной системы (улица, автомобиль, участники движения-пешеходы и водители и окружающая среда); наибольшее влияние оказывают следующие факторы: разные расстояния между перекрестками, неравномерное распределение потоков транспорта и пешеходов, разные скорости движения транспорта на отдельных полосах, размещение остановок общественного транспорта у перекрестков, неодинаковое поведение отдельных участников движения.
Для транспортного потока, движущегося по отдельной полосе у перекрестка, целевая минимизационная функция имеет вид:
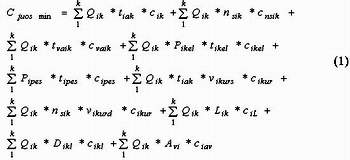
где: i - индекс полосы движения для отдельного перекрестка (i=1-n); k - число видов транспорта в одной полосе (k=1-8) ; C juos min - минимизируемые транспортные потери для i - ой полосы, Литас/ч. Qik - величина транспортного потока k-ого типа в i-ой полосе, авт/ч. tiak - транспортные задержки у перекрестка, авт.ч.; cik - средняя стоимость 1 часа простоев, Литас/ч.; nsik - число торможений за час в i-ой полосе; cnsik - средняя стоимость 1 торможения , Литас/торм.; tvaik - транспортные потери времени водителей, ч.; cvaik - средняя стоимость 1 часа водителей, Литас/ч.; Pikel - среднее число пассажиров в автобусе (троллейбусе), пасс.; tikel - среднее время ожидания 1 пассажира на перерестке, ч.; cikel - оценка стоимости 1 часа времени пассажира, Литас/ч.; Pipes - число пешеходов, пересекающих перекресток , пеш/ч.; tipes - среднее время ожидания 1 пешехода на перерестке, ч.; cipes - оценка стоимости 1 часа времени пешехода, Литас/ч.; vikurs - расход топлива на холостом ходу, лтр/ч.; cikur - цена топлива, Литас/л.; vikurd - дополнительный расход топлива на 1 торможение/ускорение, л; Lik - увеличение уровня шума в зоне перекрестка из за торможения / ускорения, dBA; ciL - оценка ущерба из за увеличения шума, Литас/dBA; Dikl - увеличение выбросов в зоне перекрестка ( СО, СН, и т. д.), кг/ч.; cil - оценка ущерба от выхлопных газов (отдельно для каждого типа), Литас/кг; Avi - снижение числа ДТП на перекрестке , ДТП/год; ciav - средняя оценка 1 ДТП , Литас/ 1 ДТП.
Чтобы оценить все потоки транспорта и пешеходов на одном перекрестке, формируется фунция минимизации, которая для n полос движения имеет вид:
![]() (2)
(2)
Для всей системы (подсистемы) АСУДД, состоящей из m перекрестков, целевая функция имеет вид:
![]() (3)
(3)
Как первоначальное приближение для расчета оптимальных планов работы светофоров, могут быть приняты такие длины фаз в отдельном цикле, которые гарантировали бы одинаковую степень насыщения для всех фаз, как это рекомендуется литературой [3]. Предлагаемая многоцелевая оптимизационная функция обобщает долголетние научные исследования 1988-2000 гг., которые реализованы в новой версии программы OPTPLA. По этой программе были рассчитаны новые оптимальные планы работы светофоров для 3 новых АСУДД с програм-мируемыми контроллерами в Вильнюсе (17 перекрестков), АСУДД в Шяуляй (14 перекрестков) и уточнены параметры оптимизационной функции в практических условиях. Эффект от использования многоцеле-вой функции оптимизации особенно заметен на перекрестках централь-ной части г. Вильнюса, где специфическое влияние оказывают большие троллейбусные потоки.
4. Практическое применение многоцелевых оптимизационных функций.
Величина транспортных потоков на отдельных полосах мо-жет быть получена при помощи транспортных детекторов, встроенных в покрытие перед СТОП - линией. Полученные величины должны быть откалиброваны на состав транспортного потока методом натурных об-следований на критических перекрестках. Такие обследования должны проводиться для утренних, вечерних часов пик, для межпиковых перио-дов, отдельно для рабочих и выходных дней. Величина и продолжитель-ность обследований транспортных потоков должны быть обоснованы и соответствовать требованиям статистической достоверности данных [1]. В связи с ростом числа автомобилей, с перегрузкой отдельных перекре-стков и перераспределением транспортных потоков, обследование транс-портных потоков и изменение базовых данных о перекрестках и перего-нах должны производиться не реже чем каждые 2 года.
Основная проблема, возникающая при применении многоцелевых оптимизационных функций, - чувствительность к погрешностям исходных параметров функции. На величину этих параметров сильно влияют цена топлива, средняя величина зарплаты и другие экономические пока-затели. Параметры, которые собраны автором за 1994- 1999 гг. и могут быть применены при проектировании АСУДД для городов Литвы, при-ведены в таблице. Многоцелевые оптимизационные функции очень хо-рошо пригодны для оптимального управления с применением АСУДД, когда нагрузка одной полосы не превышает 0,88 - 0,95 теоретической пропускной способности одной полосы. Если нагрузка превышает теоре-тическую пропускную способность, тогда следует применять модели управления с перенасыщенными транспортными потоками.
5. Выводы
1. Использование многоцелевой оптимизационной функции при расчете оптимальных планов работы светофоров для АСУДД разрешает обоснованно учитывать различные, даже противоречивые факторы, если влияние факторов учитывается в денежном выражении.
2. Так как в различных странах и даже городах отдельные факторы в денежном выражении учитываются по-разному, необходима калибровка параметров целевой оптимизационной функции, с учетом местных особенностей учета потерь от ДТП и загрязнения окружающей среды.
3. В настоящее время расчет оптимальных планов работы светофоров ведется на быстродействующих персональных компютерах ( тактовая частота процессора > 1500 Mhz), поэтому расчеты на основе сложных нелинейных оптимизационных функций, при получении данных от транспортных детекторов и передаче управляющих сигналов в контроллеры светофоров на перекрестках, могут вестись в реальном времени, т.е. за 8-9 секунд для каждого цикла.
Начальные параметры оптимизационной функции
|
№ п/п |
Наименование параметров оптимизационной функции ( цены на 1 января 2000 г.) |
Величина параметра |
|
1 |
Стоимость 1 часа задержек легковых автомобилей, Литас/ч. |
0,81 |
|
2 |
Стоимость 1 часа задержек грузовых автомобилей, Литас/ч. |
8,4 |
|
3 |
Стоимость 1 часа задержек автоусов, Литас/ч. |
5,6 |
|
4 |
Стоимость 1 часа задержек пассажиров, Литас/ч. |
0,44 |
|
5 |
Стоимость 1 часа задержек водителей груз. автомобилей, Литас/ч. |
6,3 |
|
6 |
Стоимость 1 часа задержек пешеходов, Литас/ч. |
0,32 |
|
7 |
Стоимость (средняя) 1 литра топлива , Литас/литр |
2,11 |
|
8 |
Ущерб от загрязнения ОС транспортным шумом, Литас/1 чел/год |
16,1 |
|
9 |
Ущерб от загрязнения ОС транспортным шумом, Литас/1 чел/год |
0,96 |
|
10 |
Ущерб от загрязнения ОС выхлопными газами СО, Литас/1 кг |
3,03 |
|
11 |
Ущерб от загрязнения ОС выхлопными газами NO2, Литас/1 кг |
39,46 |
|
12 |
Ущерб от загрязнения ОС выхлопными газами SO2, Литас/1 кг |
21,12 |
|
13 |
Ущерб от загрязнения ОС твердыми частицами- сажей, Литас/1 кг |
288,0 |
|
14 |
Ущерб от загрязнения ОС соединениями свинца, Литас/1 кг (Для транзитных потоков) |
21504 |
|
15 |
Ущерб от загрязнения ОС бензапиреном, Литас/1 кг |
120960 |
|
16 |
Ущерб от ДТП, Литас/ 1 ДТП |
6421 |
|
17 |
Стоимость 1-ого торможения автомобилей, Литас/ 1 торм. |
0,06 |
Примечание: 4 литас = 1 доллар США
Литература
1. W. Brilon, M. Grossmann, H. Blanke. Verfahren fuer die Berechnung der Leistungsfaeigkeit und Qualitaet des Verkehrsablaufes auf Strassen. Forschung Strassenbau und Strassenverkehrstechnik. Heft 669. 1994. Bundesministerium fuer Verkehr. Bonn- Bad Godesberg. 350 S.
2. J. Porada. Das Modell TRANSYT 6C - Zur Optimierung koordinierter Lichtsignalsteuerung. Aachen, 1980. 104 S.
3. P. Pitzinger. Lichtsignalanlagen: Abnahme, Betrieb, Wartung. Forschungsbericht Nr. 398 auf Antrag der Vereinigung Schweizerischer Strassenfachleute VSS. Bundesamt fuer Strassenbau. Bern, 1998. 216 S.
4. В.Аксенов, Е. Попова, О. Дивочкин. Экономическая эфективность ра-циональной организации дорожного движения. - М.: Транспорт, 1987. 128 с.
5. Клибавичус А. Методические указания по проектированию систем ко-ординированного регулирования движения в уличной сети по програме ОПТПЛА. Вильнюс, 1985. 29 с. 6. Руководство по регулированию движения в городах. - М.: Стройиздат, 1974. 97 с.